Section 11.6 showed how we can use vector valued functions of two variables to give a parameterization of a surface in space. For instance, the function with domain and parameterizes a sphere of radius centered at the origin. Section 11.6 also gives examples of how to write parameterizations based on other geometric relationships like when one coordinate can be written as a function of the other two. In Subsection 11.6.2, we set up a Riemann sum based on a parameterization that would measure the surface area of our curved surfaces in space.
In Figure 12.9.1, we plot a surface using a parametrization . The magenta curves represent curves where varies and is held constant, while the yellow curves represent curves where varies and is held constant. The vector in magenta is which measures the direction and magnitude of change in the coordinates of the surface when only is varied. Similarly, the vector in yellow is which measures the direction and magnitude of change in the coordinates of the surface when only is varied. We also plot the parallelogram that is formed by and , which is tangent to the surface. The area of this parallelogram offers an approximation for the surface area of a patch of the surface.
From Section 9.4, we also know that (plotted in green) will be orthogonal to both and and its magnitude will be given by the area of the parallelogram.
In this preview activity, we will explore the parameterizations of a few familiar surfaces and confirm some of the geometric properties described in the introduction above.
Draw your vector results from d on your graph and confirm the geometric properties described in the introduction to this section. Namely, and should be tangent to the surface, while should be orthogonal to the surface (in addition to and ).
As we saw in Section 11.6, we can set up a Riemann sum of the areas for the parallelograms in Figure 12.9.1 to approximate the surface area of the region plotted by our parametrization. Equation (11.6.2) shows that we can compute the exact surface area by taking a limit of a Riemann sum which will correspond to integrating the magnitude of over the appropriate parameter bounds. What if we wanted to measure a quantity other than the surface area? Our focus in this section we will be the exploration of a specific case of this question: How can we measure the amount of a three dimensional vector field that flows through a particular section of a surface? The geometric tools we have reviewed in this section, especially the vector , will be valuable.
Subsection12.9.1The Idea of the Flux of a Vector Field through a Surface
In this section we will look at how to measure the amount of a vector field that flows through a surface in space. Figure 12.9.2 illustrates a plot that demonstrates this idea. Our definition of divergence in Section 12.6 looked at measuring the amount of vector field flowing out of a small region on a 2D plane. In this subsection, we will set up a precise measurement of this same measurement but over a region of a curved surface in 3D.
As with understanding line integrals of vector-valued functions in Section 12.2, we don’t care about the output of the vector field at points away from the surface. We would really would like to examine the output vectors for the points on our surface. To do this, we will look at Figure 12.9.3, which plots the output of our vector field at an array of points on our surface.
The central question we would like to consider is “How can we measure the amount of a three dimensional vector field that flows through a particular section of a curved surface?”, so we only need to consider the amount of the vector field that flows through the surface. Any portion of our vector field that flows along (or tangent) to the surface will not contribute to the amount that goes through the surface. In Figure 12.9.4, we have split the vector field for points on our surface into two components. One component, plotted in green, is orthogonal to the surface. The component that is tangent to the surface is plotted in magenta.
In order to measure the amount of the vector field that moves through the plotted section of the surface, we must find the accumulation of the lengths of the green vectors in Figure 12.9.4. Notice that some of the green vectors are moving through the surface in a direction opposite of others. In other words, we will need to pay attention to the direction in which these vectors move through our surface and not just the magnitude of the green vectors.
If we have a parameterization of the surface, then the vector varies smoothly across our surface and gives a consistent way to describe which direction we choose as “through” the surface. If we define a positive flow through our surface as being consistent with the yellow vector in Figure 12.9.4, then there is more positive flow (in terms of both magnitude and area) than negative flow through the surface. Thus, the net flow of the vector field through this surface is positive.
Activity12.9.2.Visualizing flux through a surface.
In this activity, you will compare the net flow of different vector fields through our sample surface. In Figure 12.9.5 you can select between five different vector fields. Once you select a vector field, the vector field for a set of points on the surface will be plotted in blue. Each blue vector will also be split into its normal component (in green) and its tangential component (in magenta). The yellow vector defines the direction for positive flow through the surface.
Look at each vector field and order the vector fields from greatest net flow through the surface to least net flow through the surface. Remember that a negative net flow through the surface should be lower in your rankings than any positive net flow.
Subsection12.9.2The Details of Measuring the Flux of a Vector Field through a Surface
Now that we have developed a conceptual understanding of what we are trying to measure, we can set up the corresponding Riemann sum to measure the flux of a vector field through a section of a surface. Let be the section of our surface and suppose that is parameterized by with and . The domain of is a region of the -plane, which we call , and the range of is .
As with most problems in integral calculus, we slice our region of interest into smaller pieces. Specifically, we slice into equally-sized subintervals with endpoints and into equally-sized subintervals with endpoints . This divides into rectangles of size by . We index these rectangles as . Every has area (in the -plane) . The partition of into the rectangles also partitions into corresponding pieces which we call . From Section 11.6 (specifically (11.6.1)) the surface area of is approximated by .
We want to measure the total flow of the vector field through , which we will approximate on each and then sum to obtain the total flow. In other words, the flux of through is
Flux,
where is the length of the component of orthogonal to .
For each , we approximate the surface by the tangent plane to at a corner of that partition element. This corresponds to using the planar elements in Figure 12.9.6, which have surface area . The vector can be used to measure the orthogonal direction (and thus define which direction we mean by positive flow through ) on the partition element. This means that
Conceptually, the above limit shows how the argument in Subsection 11.6.2 generalizes when measuring the flux of a vector field through a surface rather than just the surface area. The key difference between the Riemann sum above and Riemann sum used to set up Surface area is that we are using the dot product of the vector field with the normal vector to the surface (given by ) as the scalar value in our sum. This realization gives the following theorem, which states that the flux through a curved surface in space can be computed using a parameterization of the surface and a double integral over a flat region in the plane of parameter values.
In Figure 12.9.6, you can change the number of sections in the partition and see the geometric result of refining the partition. In the next example, we will look at how Theorem 12.9.7 is used on a part of a cone and make sense of the vector and the scalar .
In some Webwork exercises and other sources, you will see flux integrals specified with the following notations:
While we will use the notation specified in Theorem 12.9.7 primarily, the other notations come from combining the normal vector (calculated from the parameterization of the surface) and the area element into a single vector valued area element. In other words, .
In this example we will compute the flux of the vector field through the surface of the cone given by with . So that we can use Theorem 12.9.7, we first parameterize our surface and calculate based on that parameterization.
In cylindrical coordinates, our cone is described by which suggests that we can use and as and . Consider the parameterization with bounds and . Notice that is acting as both and . Calculating the partial derivatives of gives the following:
Taking the cross product of and , we obtain the vector-valued function :
.
We may simplify this to
.
Notice that is very close to . If we think of as giving , then . The figure below shows the relationship between vectors and for a point on the surface.
In Figure 12.9.10, the normal vector (as calculated from the parameterization) points inside the cone. This is the direction of positive flow when measuring the flux of the vector field. Our parameterization will also transform our vector field into a function of and . Specifically,
Applying Theorem 12.9.7 to our parameterization and vector field allows us to compute as an interated integral
.
Note that the result of this flux integral is negative, which means more of the vector field is going out of the cone than is coming into the cone.
Figure12.9.11.A plot of the surface with the vector field for an array of points on the surface. The vector field has been scaled down by a factor of 5 in this plot.
In Figure 12.9.11 you can see much more of the vector field is flowing outside of the cone than inside, which matches with our result of calculating the flux as negative.
Activity12.9.3.Checking the Visualization for Flux.
(a)
Figure 12.9.12 shows a plot of the vector field and a right circular cylinder of radius and height (with open top and bottom). Consider the vector field going into the cylinder (toward the -axis) as corresponding to positive flux.
Reasoning graphically, do you think the flux of throught the cylinder will be positive, negative, or zero? Write a few sentences jutifying your answer.
Based on your parameterization, compute ,, and . Confirm that these vectors are either orthogonal or tangent to the right circular cylinder. Is your orthogonal vector pointing in the direction of positive flux or negative flux?
Write a couple of sentences to explalin how the results of the flux calculations would be different if we used the vector field and the same right circular cylinder.
write a couple of sentences to explain how the results of the flux calculations would be different if we used the vector field and the same right circular cylinder.
In the exercises for this section, we will look at some computational ideas to help us more efficiently compute the value of a flux integral. In many cases, the surface we are looking at the flux through can be written with one coordinate as a function of the others. For simplicity, we consider . Additionally, there will be exercises that guide you through common surfaces like spheres and cylinder surfaces.
Note that throughout this section, we have implicitly assumed that we can parametrize the surface in such a way that gives a well-defined normal vector. Technically, this means that the surface be orientable. Most “reasonable” surfaces are orientable. However, there are surfaces that are not orientable. Perhaps the most famous is formed by taking a long, narrow piece of paper, giving one end a half twist, and then gluing the ends together. Try doing this yourself, but before you twist and glue (or tape), poke a tiny hole through the paper on the line halfway between the long edges of your strip of paper and circle your hole. After gluing, place a pencil with its eraser end on your dot and the tip pointing away. Think of this as a potential normal vector. Keep the eraser on the paper, and follow the middle of your surface around until the first time the eraser is again on the dot. Is your pencil still pointing the same direction relative to the surface that it was before?
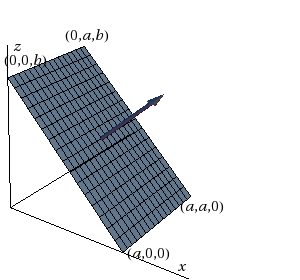
Calculate the flux of the vector field through a square of side length in the plane . The square is centered on the y-axis, has sides parallel to the axes, and is oriented in the positive y-direction.
(a) Set up a double integral for calculating the flux of the vector field through the upper hemisphere of the sphere , oriented away from the origin. If necessary, enter as rho, as theta, and as phi.
For each of the three surfaces given below, compute , graph the surface, and compute for four different points of your choosing. You should make sure your vectors are orthogonal to your surface.
For each of the three surfaces in part c, use your calculations and Theorem 12.9.7 to compute the flux of each of the following vector fields through the part of the surface corresponding to the region in the -plane.
Your result for should be a scalar expression times . Explain why the outward pointing orthogonal vector on the sphere is a multiple of and what that scalar expression means.
If we used the sphere of radius 4 instead of , explain how each of the flux integrals from part d would change. You do not need to calculate these new flux integrals, but rather explain if the result would be different and how the result would be different.
Subsection12.9.5Notes to Instructors and Dependencies
This section relies on parameterized surfaces, which was first introduced in Section 11.6. While some of the activities in this section may be too much for a single student to do in a class setting, we suggest that different cases of the vector fields and surfaces can be split for small group work. Students can then present answers to the larger group.